文章参数说明
1 算法类别
1.1 全局参数
| 参数名 | 说明 | 默认值 |
|---|---|---|
| phase number | 搜索执行次数,一次执行表示一次完整的搜索, 如果为-1,表示会一直执行 | 1 |
| random seed | 随机数种子 | 0 |
| search_time | 搜索时间(秒) | 60 |
1.2 邻域搜索
| 参数名 | 说明 | 默认值 |
|---|---|---|
| neighbor search mode | 邻域搜索模式 1. RTRIDP 2. IDPRTR 3. 随机 | random |
| neighbor size | 邻域表达小 | 25 |
| significant search | 在一次可行下降搜索中,如果实际move次数小于该阈值,则结束可行下降搜索 | 5 |
| local ratio | 在一次可行下降搜索中,如果没有导致成本变化的move占总move的比重超过该阈值,则结束可行下降搜索 | 0.8 |
| max RTR search cycle | 随机禁忌下降搜索过程中,最大允许搜索次数,该参数的作用类似与number of children | 50 |
| local minimum threshold | 在邻域搜索中,判断是否到达局部最优点 | 40 |
| tabu step | 在劣解可行搜索过程中,禁忌步数 | 500 |
| infeasible distance | 在非可行邻域搜索中,当前解距离可行区域的距离阈值,大于为过远,反之为过近 | 0.3 |
1.3 种群搜索
| 参数名 | 说明 | 默认值 |
|---|---|---|
| evolve steps | 种群搜索总进化次数 | 5 |
| pool size | 种群大小 | 5 |
| QNDF weights | 种群解中解质量-距离参数 | 0.6 |
在种群搜索中,解的fitness由如下计算: $f(s)=QNDF \ast cost(s) + (1-QNDF) \ast mean(dist(s,{s}’))$
2 算法的策略细节
2.1 搜索策略
2.1.1 RTR搜索
在可行空间内的搜索策略
local_minimum_likelihood = 1, 局部最小值似然度
local_threshold, 局部最小值阈值
cnt, 搜索尝试次数
max_RTR_search_cycle, 最大搜索尝试次数
do{
orig_val_for_uphill = 阈值禁忌搜索()
do{
cur_solution_cost = 下降搜索()
}while(cur_solution_cost<orig_val_for_uphill)
if(cur_solution_cost < orig_val_for_uphill){
local_minimum_likelihood++
cnt++
if (cnt == max_RTR_search_cycle):
local_minimum_likelihood = local_threshold
}
else{
local_minimum_likelihood += 1
}
}while(local_minimum_likelihood < local_threshold)
2.1.2 IDP搜索
在非可行空间内的搜索策略
在本阶段目标函数变为了 \[\begin{eqnarray*} f(x)&=&cost(x)+\beta\ast \sum_{r_i \in R}\max(0,load(r_i-C)) \\ \beta&=&\frac{cost(\bar{x})}{C\ast15} \end{eqnarray*}\]
$\bar{x}$表示当前已知可行解,解的搜索起点为当前已知最优解
初始化beta参数
小步非可行下降搜索()
小步非可行禁忌搜索()
if(当前解非可行){
修复当前解()
}
| 小步非可行下降搜索 | 小步非可行禁忌搜索 | |
|---|---|---|
| move operator | single insert,double insert, 2-opt, swap | single insert,double insert, 2-opt, swap |
| 解接受策略 | BEST ACCEPT | BEST ACCEPT |
| beta参数调整 | 是 | 否 |
| 是否多轮循环 | 是 | 否 |
| 固定neighbor size | 是 | 是 |
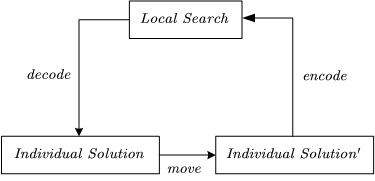
2.2 Local Search
move operator:
- invert
- single insert
- double insert
- 2-opt
- swap
move 操作实现是通过rebuild的思想来实现的
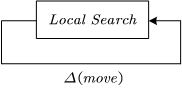
2.3 High speed Local Search
move 操作实现是通过dynamic programming的思想来实现的。
2.3.1 move operator:
- invert
- single insert
- double insert
- 2-opt
- swap
- extraction
- slice
前5种扰动都属于任务级别的扰动,为了增加邻域多样性,设计了后两种路径级别的扰动
2.3.2 采用分层解信息构建设计
-
底层是完整解信息的表示,借鉴LRU cache设计思想,通过双向链表+Hash数组来实现$O(1)$复杂度的搜索。 此外为了为了更好地对路径信息进行建模,在路径之间插入Dummy Node,借鉴内存池的想法, 对Dummy Nodes进行动态管理,减少内存的申请释放的开销。
-
上层为路径信息层,是对底层信息的聚合,包含路径的ID,起始点,载重,长度,服务数等元信息, 该数据结构用于move的预判断,同样路径信息也属于动态资源,使用资源池的设计进一步减少系统级的 内存调用。
在执行move操作的时候,两层信息的同步处理均可以在$O(1)$的时间复杂度内完成
2.4 move operator设计
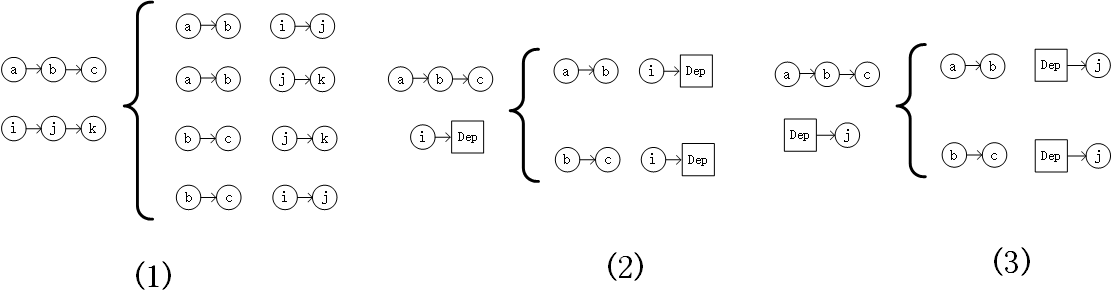
2.4.1 single insert
将一个任务插到另一个任务的附近(前面或后面)
- 当待插入点是Dummy Node时,需要遍历每一条路径的起点与终点,并尝试插入其附近的位置
- 当待插入点不是Dummy Node时,需要考虑两个任务是否相邻
- 如果不相邻,需要同时考虑前插和后插两个位置
- 如果相邻,则是能考虑插入一个位置
2.4.2 double insert
将连续的两个任务插入到另一个任务的附近,连续的任务是指在一条路径中连续服务的一组任务
- 当待插入点是Dummy Node时,需要遍历每一条路径的起点与终点,并尝试插入其附近的位置
- 当待插入点不是Dummy Node时,需要考虑待插入任务序列的端点与插入任务是否相邻
- 如果不相邻,需要同时考虑前插和后插两个位置
- 如果相邻,则是能考虑插入一个位置
在普通Local Search中,插入位置只考虑了后插入,在High Speed Local Search 中考虑了两个方向上的插入。
此外需要注意在插入前需要检查是否有overlap的情况,即插入任务包含在待插入序列内部
2.4.3 2-opt
对路径进行切割重连的操作
-
对于两个任务属于同一个路径,进行反转操作
 flip
flip -
对于两个任务不属于同一个路径,进行cross over操作
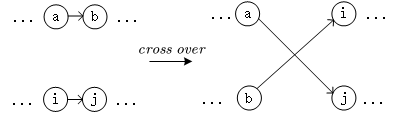 cross over
cross over
2.4.4 Swap
交换两个任务的位置
- 当待插入点是Dummy Node时,需要遍历每一条路径的起点与终点,并尝试交换两者的位置
- 当待插入点不是Dummy Node时,直接交换两者的位置
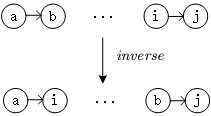
2.4.5 Invert
反转任务,即反转一个边任务
2.4.6 Extraction
路径级别的扰动,将一个路径分割为三段子路径
2.4.7 Slice
路径级别的扰动,将一个路径切割为两段子路径
- pre slice,切割点在备选任务前面
- post slice,切割点在备选任务后面
因为涉及到路径的增加,上述两个operator只在阈值禁忌搜索的过程中会执行有效操作。 此外上述两个算符属于单目算符,并不涉及到neighbor空间的搜索
3. 约束处理
3.1 载重约束
载重约束可以看作0维约束,给定一个服务序列$W=\{w_1,…w_n\}$, 载重约束顺序无关,时间复杂度$O(n)$ \[Demand(i):\sum_{j=1}^{i}d(W_j)\leqslant C, \forall i \in W\]
3.2 时间窗约束
时间窗约束可以看做1维约束,给定一个服务序列$W=\{w_1,…w_n\}$, 时间窗约束顺序相关,时间复杂度$O(n)$ \[a_{i} \leqslant DriveT(i):t_{depot,W_1}+\sum_{j=2}^{i}t_{W_{j-1},W_{j}} \ + \sum_{j=1}^{i-1}s_{W_{j}}\leqslant b_i, \forall i \in W\]